













Unitree G1 EDU U5 - Humanoider Roboter
High-Performance-Humanoid für anspruchsvolle Anwendungen – 2× RH56 Fünffinger-Hände, 41 DOF, 120 Nm.
 Ihre Expertin für
Ihre Expertin für 

Jetzt kaufen mit

Unitree G1 EDU-U5 – Humanoider Roboter für fortgeschrittene Ausbildung und Forschung
Der Unitree G1 EDU-U5 ist ein leistungsfähiger humanoider Roboter für den Einsatz in fortgeschrittener Ausbildung, Forschung und technischer Entwicklung. Er kombiniert eine humanoide Bewegungsarchitektur mit präziser Aktorik, stabiler Balance und einer erweiterten, entwicklungsorientierten Systemplattform. Die EDU-U5-Version ist innerhalb der G1-EDU-Serie als leistungsstarke Mittel- bis Oberstufe positioniert und eignet sich für komplexere Lern- und Forschungsprojekte. Dank integrierter Sensorik, Echtzeit-Regelung und KI-fähiger Softwarearchitektur können anspruchsvollere Bewegungsabläufe, autonome Funktionen und Interaktionsszenarien entwickelt und getestet werden. Der Unitree G1 EDU-U5 positioniert sich als vielseitige Bildungs- und Forschungsplattform für humanoide Robotik mit Fokus auf Leistungsfähigkeit, Erweiterbarkeit und Systemtiefe.
KI-Testbericht
Im Erstkontakt wirkt der Unitree G1 EDU U5 wie eine Plattform, nicht wie ein Showpiece: Nach dem Setup mit Controller und der 9000mAh Lithium-Batterie (typisch etwa zwei Stunden Betrieb) startet er mit einem leisen Surren, verlagert Gewicht kontrolliert und steht stabil, wobei sich die lokale Luftkühlung im Dauerlauf als spürbar beruhigender Faktor für konstante Testsessions zeigt. In der Bewegungsprüfung liefert die EDU-Auslegung mit bis zu 43 Gelenkmotoren (je nach Variante 23–43 Freiheitsgrade) reproduzierbare Abläufe; die Doppel-Encoder machen Gelenkzustände sauber nachvollziehbar, und definierte Bewegungsräume wie Taillen-Z-Achse ±155°, Knie 0–165°, Hüfte P ±154°, R -30 bis +170°, Y ±158° helfen, Versuche als Parameter statt als "Gefühl" zu fahren—unter Lastspitzen bleibt das System dank erhöhtem Knie-Drehmoment von 120 N·m (Base: 90 N·m) sichtbar souverän.
In der Manipulationsszene (zylindrische Objekte, kleine Boxen) überzeugt die mechanische Hand mit Kraft- und Positionsregelung und sieben Freiheitsgraden durch kontrolliertes Ansetzen, Halten und Ablegen; die Arm-Traglast von ca. 3 kg (Base: ca. 2 kg) erweitert den Praxisrahmen für Tools und Sensor-Add-ons, ergänzt durch die Roboterhand-Modelle RH56DFTP (rechts & links). Für räumliche Robustheit im Labor koppelt der G1 U5 eine Intel RealSense D435 Tiefenkamera mit einem LIVOX Mid 360 3D LiDAR: Stuhl-Umstellungen und Personen am Rand werden als Geometrie nutzbar, während WiFi 6 und Bluetooth 5.2 stabile Anbindung für Daten und Peripherie liefern. Compute-seitig verkürzt die 8‑Kern‑CPU in Kombination mit dem NVIDIA Jetson Orin NX Erweiterungsdock (100 TOPS) die Iterationsschleife deutlich, OTA‑Updates halten den Softwarestand ohne Projektbruch aktuell; als Sicherheits- und Betriebskriterium fällt positiv auf, dass sich der Roboter nach einem Sturz selbstständig wieder aufrichten kann—insgesamt eine präzise, programmierbare Forschungs- und Lehrplattform für sekundäre Entwicklung, die Kontrolle, Sensorik und Rechenreserve konsequent auf reale Iteration auslegt. 🤖

-

 UNITREE G1 BATTERY 9000 MAH799,95 € 672,23 €UVP-Brutto: 839,99 € Preis-Brutto: 799,95 €
UNITREE G1 BATTERY 9000 MAH799,95 € 672,23 €UVP-Brutto: 839,99 € Preis-Brutto: 799,95 €Sie sparen: 40,04 € Brutto (4.77 %)
Lieferzeit Vorbestellbar-Wareneingang erwartet
Stellen Sie eine Frage an unser Service Team!
Unitree G1 EDU U5 - Humanoider Roboter
🤖 Unitree G1 EDU U5 – Humanoider Roboter für Forschung, Lehre und schnelle Iteration
Ein leises Surren, ein kurzer Moment, in dem sich Gewicht verlagert – und dann steht er da, als hätte er den Raum bereits verstanden. Der Unitree G1 EDU U5 wirkt nicht wie ein Ausstellungsstück, sondern wie ein System, das auf Einsatz wartet: auf den nächsten Versuch, die nächste Abweichung, die nächste Messreihe.
In Laboren und Hörsälen ist das der entscheidende Unterschied. Nicht das Staunen zählt, sondern der Moment, in dem Robotik verlässlich wird: Bewegungen wiederholbar, Zustände nachvollziehbar, Fehler nicht peinlich, sondern produktiv. Der G1 U5 fühlt sich genau für diesen Takt gebaut an – Hypothese, Test, Iteration.
Er ist eine Forschungsplattform mit Körper. Eine, die Ideen nicht nur als Code respektiert, sondern als Bewegung ausführt: Balance wird sichtbar, Interaktion wird greifbar, Lernen wird zu etwas, das man beobachten, messen und verändern kann.
🦿 Wenn Freiheitsgrade zu echten Experimenten werden
Stell dir eine praktische Übung vor: ein Gehversuch über eine leicht unebene Laborfläche, während Studierende Parameter variieren und beobachten, wie sich Stabilität und Timing verändern. Genau hier entsteht der Wert des G1 U5: Nicht, dass er sich bewegt – sondern dass seine Bewegungen in feinen Abstufungen steuerbar und reproduzierbar sind.
Mit bis zu 43 Gelenkmotoren wird aus einem einfachen Ablauf eine komplexe Choreografie. Die EDU-Varianten skalieren je nach Modell von 23 bis 43 Freiheitsgraden, sodass du die Plattform passend zu deinem Curriculum oder deiner Forschungsfrage auswählen kannst. Diese Freiheitsgrade sind nicht „mehr“ um des Mehr willen – sie sind die Auflösung, mit der du Verhalten untersuchen kannst: in der Taille (je nach Variante bis zu 3), in den Armen (bis zu 7), in der Hand (bis zu 9).
Die Mechanik bekommt dabei Charakter durch Kontrolle: Doppel-Encoder in den Gelenken unterstützen eine präzise Erfassung, lokale Luftkühlung hält den Betrieb stabil. Und die klar beschriebenen Bewegungsräume machen aus Vermutungen Parameter: Taillen-Z-Achse ±155°, Knie 0–165°, Hüfte P ±154°, R -30 bis +170°, Y ±158°.
Im Workflow spürst du das, weil du weniger „Zufall“ und mehr Systematik bekommst. Bewegungen lassen sich anfahren, vergleichen und wiederholen, ohne dass jedes Mal die Ausgangslage neu erfunden werden muss. Kaufentscheidend wird das, wenn du nicht nur demonstrieren willst, sondern messen: Je besser die Plattform definierte, wiederholbare Bewegungen liefert, desto weniger Zeit verlierst du in der Fehlersuche, die eigentlich nur Varianz ist.
Und wenn Dynamik gefragt ist, zeigt sich Reserve in Zahlen, die etwas bedeuten: In den EDU-Modellen steigt das Knie-Drehmoment auf 120 N·m (Base: 90 N·m). Das ist der Unterschied zwischen einem „sicheren“ Ablauf und einem System, das auch bei anspruchsvolleren Sequenzen stabil bleibt.
✋ Wenn Greifen nicht grob wirkt, sondern kontrolliert
Ein Versuch mit Alltagsobjekten wirkt oft banal, bis du ihn wirklich automatisierst: Ein zylindrischer Becher, eine kleine Box, ein Werkzeuggriff. In der Praxis entscheidet nicht die Idee, sondern der Griff. Rutscht er? Klemmt er? Verzieht er das Objekt? Der G1 U5 setzt genau hier an, weil Manipulation nicht als Nebenschauplatz gedacht ist, sondern als Forschungsfeld.
Die mechanische Hand verbindet Kraft- und Positionsregelung und bringt sieben Freiheitsgrade mit. Dadurch wird Greifen zu einer kontrollierten Handlung statt zu einer groben Klammer: halten, ausrichten, ablegen – wiederholbar und nachvollziehbar. Das ist besonders in Lehre und Forschung relevant, weil du nicht nur Ergebnisse bekommst, sondern Ursachen untersuchen kannst: Welche Bewegung erzeugt welche Kraft? Welche Bahn führt zu welcher Stabilität?
Im Alltag bedeutet das weniger Improvisation. Du kannst Versuchsaufbauten planen, die Objekte bewusst einbeziehen, ohne sofort auf Sonderkonstruktionen auszuweichen. Und wenn Interaktion tiefer gehen soll, erweitert Zubehör den Charakter des Systems: inspirierte Roboterhand-Modelle RH56DFTP (rechts & links) sind Teil des Setups und bringen Manipulation näher an reale Aufgaben.
Auch die Traglast am Arm zeigt, dass es nicht nur um Bewegung, sondern um Nutzbarkeit geht: ca. 3 kg bei den EDU-Modellen (Base: ca. 2 kg). Das macht Versuche mit realen Objekten, Sensor-Add-ons oder leichten Tools praktikabler, ohne dass die Plattform sofort an Grenzen stößt.
Kaufentscheidend ist dieser Abschnitt, wenn du ein System suchst, das nicht nur laufen kann, sondern mit der Umgebung arbeiten soll. Der Unterschied zwischen „Humanoid als Demo“ und „Humanoid als Plattform“ zeigt sich oft zuerst in der Hand.
👁️ Wenn der Raum lesbar wird – Tiefenbild und LiDAR als Orientierung
Ein Labor ist selten so ordentlich wie ein Simulationsraum. Stühle stehen anders, Kabel verlaufen neu, Menschen bewegen sich im Randbereich. In genau diesen Momenten zeigt sich, ob ein humanoides System nur eine Abfolge abspult – oder ob es die Umgebung als Entscheidungsgrundlage nutzen kann.
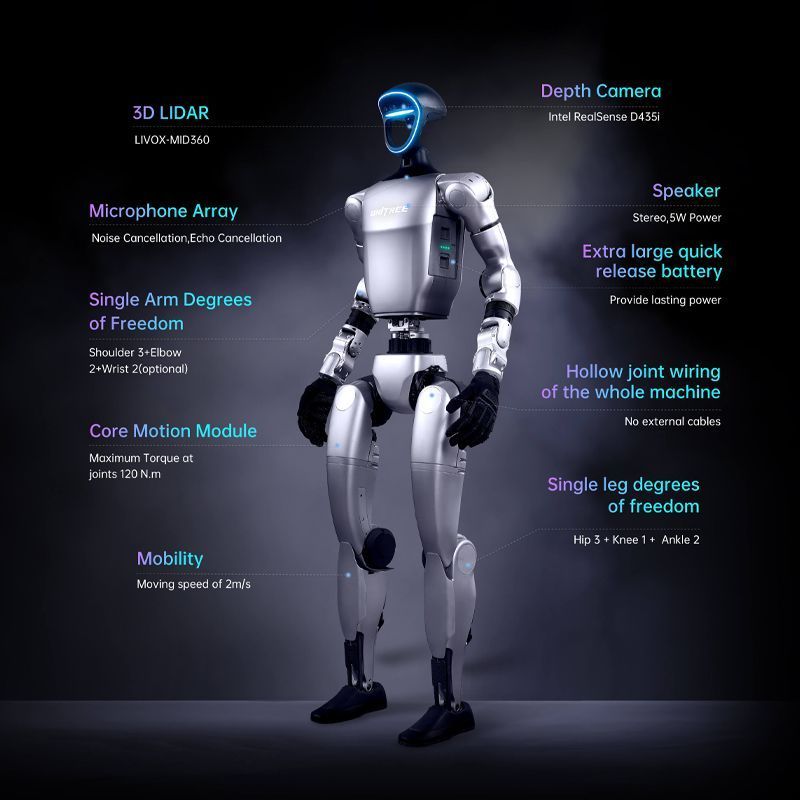
Der G1 U5 kombiniert dafür Tiefenwahrnehmung und 3D-Erfassung: Eine Tiefenkamera (Intel RealSense D435) und ein 3D LiDAR-Sensor (LIVOX Mid 360) geben ihm die Möglichkeit, Räume zu strukturieren, Distanzen zu erfassen und Objekte als Teil der Szene zu erkennen. Das ist keine Kosmetik – es ist die Grundlage für Navigation, Objekterkennung und sichere Bewegungsplanung.
Technisch bedeutet das: Statt nur auf vordefinierte Punkte zu reagieren, kann das System seine Position und seine Umgebung als kontinuierliche Geometrie behandeln. Im Versuchsbetrieb wird daraus ein echter Vorteil, weil du Szenarien variieren darfst, ohne jedes Mal den gesamten Ablauf neu zu bauen. Du verbringst weniger Zeit damit, die Welt „roboterfreundlich“ zu machen, und mehr Zeit damit, Robotik an die Welt anzupassen.
Im Workflow spürst du das bei Demonstrationen und Tests gleichermaßen. Eine Übung kann spontan umgestellt werden, ein Parcours kann wachsen, eine Lehrveranstaltung kann auf Fragen reagieren, statt nur ein Skript vorzuführen. Kaufentscheidend wird diese Sensorik für alle, die aus Simulation in den Raum wechseln wollen, ohne dabei sofort die Komplexität zu verlieren.
Und weil Robotik selten allein steht, bleiben die Verbindungen stabil: WiFi 6 und Bluetooth 5.2 sind an Bord, damit Daten, Steuerung und Peripherie in modernen Umgebungen nicht an Funk-Altlasten scheitern.
🧠 Wenn Rechenleistung deine Lernkurve verkürzt
KI-Logik ist nur so elegant, wie sie im Moment der Entscheidung sein kann. Sobald Wahrnehmung, Planung und Regelung gleichzeitig laufen, entscheidet Rechenreserve nicht über Komfort, sondern über Möglichkeit. Der G1 U5 ist deshalb nicht nur Mechanik, sondern auch ein tragfähiger Compute-Stack für reale Experimente.
Im Kern arbeitet eine 8-Kern-Hochleistungs-CPU als Grundlage. Dazu kommt beim G1 U5 ein NVIDIA Jetson Orin NX Erweiterungsdock mit 100 TOPS Rechenleistung. Das ist der Raum, in dem Modelle atmen können: mehr Reserven für Wahrnehmung, Planung, Echtzeit-Entscheidungen und KI-Workloads, ohne dass du jeden Schritt in die Zukunft verschieben musst.
In der Praxis entsteht daraus ein anderes Arbeiten. Du kannst schneller von einer Idee zur nächsten Messung kommen, weil das System mehr gleichzeitig leisten kann und weniger auf externe Infrastruktur angewiesen ist. Das reduziert Reibung: weniger Umwege, weniger „wir rechnen das später“, mehr unmittelbares Feedback am realen Körper.
Auch der Software-Charakter ist auf Iteration ausgelegt: OTA-Updates halten das System aktuell, ohne dass Aktualisierung jedes Mal wie ein Neustart des Projekts wirkt. Und weil Forschung selten bei Standardfunktionen stehenbleibt, ist der G1 U5 programmierbar und für sekundäre Entwicklung ausgelegt – als Plattform, die sich an deine Fragestellung anpasst.
Kaufentscheidend ist diese Kombination, wenn du nicht nur demonstrieren, sondern entwickeln willst: Ein humanoider Roboter, der sehen, rechnen und handeln kann, ohne dass du jede Experimentstufe um externe Rechenknoten herum organisieren musst.
🎥 Wenn Bewegung zur Evidenz wird
Manchmal reicht ein Satz nicht, um zu erklären, wie sich Kontrolle anfühlt. Bewegung ist die Sprache dieses Systems – und wenn du sie siehst, verstehst du sofort, warum Wiederholbarkeit, Balance und Reaktion mehr sind als Begriffe.
Das Video zeigt den G1 im Einsatzkontext und macht sichtbar, was Datenblätter oft nur andeuten: wie schnell ein Versuch von der Idee zur Ausführung kommt, wie lebendig Dynamik wirken kann, wenn sie kontrolliert bleibt, und wie präsent ein humanoider Körper im Raum ist, ohne den Raum zu dominieren.
Gerade für Teams, die intern über die passende Plattform entscheiden, ist das ein hilfreicher Realitätscheck: nicht als Show, sondern als Eindruck davon, wie sich Forschung in Bewegung anbahnt.
💳 Liquidität für deine Versuchsreihen, nicht für Warteschleifen
In Forschung und Lehre ist Budget oft nicht das Ende einer Idee, sondern der Engpass ihres Timings. Wenn Projekte an Semesterpläne, Förderfenster oder Laborbelegungen gekoppelt sind, braucht die Beschaffung einen Weg, der Realität respektiert.
Für den Unitree G1 EDU U5 ist 0% Leasing möglich – als Option, die Investition planbar macht, ohne den technischen Anspruch zu verkleinern. So kann der Start eines Projekts an den Zeitpunkt geknüpft sein, an dem das Team bereit ist, nicht an den Moment, in dem sich Budgetlinien zufällig überlappen.
Im TONEART-Kontext bedeutet das vor allem: ein pragmatischer Einstieg in eine Plattform, die auf Dauerbetrieb und Iteration ausgelegt ist. Du behältst Luft für Sensorik, Peripherie und Zeit – also für alles, was Experimente am Ende wirklich voranbringt.
📦 Wenn Auspacken sich wie Projektstart anfühlt
Der erste Kontakt ist ein stiller Test: Passt das System in deinen Alltag, bevor es in deine Forschung passt? Beim G1 U5 beginnt dieser Moment nicht mit Suchen, sondern mit Struktur. Du hast nicht das Gefühl, ein Puzzle zu öffnen, sondern eine Plattform, die dich in den ersten Versuch tragen will.
Zum Setup gehört der Roboter als zentrale Einheit, dazu ein Controller für manuelle Steuerung – besonders wertvoll für die ersten Schritte, für kontrolliertes Debugging und für Situationen, in denen du bewusst führen willst, bevor du Autonomie freigibst. Dazu kommen Energie und Rhythmus: eine 9000mAh Lithium-Batterie für eine typische Betriebsdauer von etwa zwei Stunden sowie Ladezubehör (54V 5A), damit aus einer Pause wieder schnell Betrieb wird.
Und weil Manipulation oft das Herzstück eines Projekts ist, sind zusätzliche Roboterhand-Modelle RH56DFTP (rechts und links) Teil des Lieferbilds, wie Werkzeuge statt Beiwerk. Detaillierte Informationen zum vollständigen Lieferumfang finden Sie im Tab ’Lieferumfang’ auf dieser Seite.
🧩 Wenn Fragen nicht bremsen, sondern klären
Eine typische Frage im Alltag lautet nicht: „Was kann er?“ Sondern: „Was passiert, wenn etwas schiefgeht?“ Beim G1 U5 ist eine der beruhigendsten Eigenschaften seine Praxisnähe: Er kann sich selbstständig wieder aufrichten, wenn er zu Boden geht. Das klingt wie ein Detail, ist aber im Versuchsbetrieb ein echter Taktgeber – weil ein Sturz nicht das Ende des Flows sein muss.
Ebenso wichtig ist die Frage nach Sessionlänge und Rhythmus: Mit einer typischen Laufzeit von etwa zwei Stunden ist das System auf echte Blöcke ausgelegt – nicht nur auf kurze Demos. In Lehrumgebungen bedeutet das weniger Unterbrechungen, in der Forschung bedeutet es längere Messreihen ohne ständiges Energie-Management.
Und dann ist da die Frage nach Entwicklungstiefe: Der G1 U5 ist nicht als geschlossene Vorführmaschine gedacht, sondern als programmierbare Plattform mit Möglichkeit zur sekundären Entwicklung. Das ist die Grundlage dafür, dass Studierende nicht nur konsumieren, sondern gestalten, und dass Teams nicht nur testen, sondern echte Prototypen auf realer Hardware fahren.
Weitere häufig gestellte Fragen und detaillierte Antworten finden Sie im FAQ-Tab auf dieser Seite.
🏁 Wenn aus Robotik ein verlässlicher Forschungsalltag wird
Der Unitree G1 EDU U5 ist dann am stärksten, wenn du ihn nicht mehr erklären musst. Wenn er im Raum steht, sich orientiert, Bewegungen ausführt und Fehler in neue Versuche verwandelt. Wenn aus dem „Beeindruckend“ ein „Benutzbar“ wird.
Seine Stärke liegt in der Kombination: humanoide Dynamik mit bis zu 43 Freiheitsgraden, präziser Gelenkerfassung, Manipulation mit kontrollierter Hand, Umgebungswahrnehmung über Tiefenkamera und 3D LiDAR, und Compute-Reserven durch Jetson Orin NX mit 100 TOPS. Das ergibt keine Feature-Liste, sondern einen Arbeitsraum für Entwicklung.
So wird der G1 U5 zu einem System, das nicht im Showroom lebt, sondern in deiner Messreihe, deinem Semesterprojekt, deinem Prototyp. Ideal für Forschungseinrichtungen, Universitäten, Robotiklabore, KI-Entwicklungsteams und Innovationsabteilungen, die humanoide Bewegung, Wahrnehmung und Manipulation auf einer realen Plattform testen und weiterentwickeln.
Eigenschaften
- Humanoider Roboter als Plattform für Forschung und Lehre.
- EDU-Variante mit bis zu 43 Freiheitsgraden (modellabhängig 23 bis 43).
- Gelenke mit Doppel-Encodern zur präzisen Erfassung von Bewegungszuständen.
- Lokale Luftkühlung zur Stabilisierung des Betriebs der Gelenkmotoren.
- Knie-Drehmoment in den EDU-Modellen bis 120 N·m (Base: 90 N·m).
- Mechanische Hand mit Kraft- und Positionsregelung und 7 Freiheitsgraden.
- Arm-Traglast in den EDU-Modellen ca. 3 kg (Base: ca. 2 kg).
- Sensorik mit Tiefenkamera Intel RealSense D435 und 3D-LiDAR LIVOX Mid 360 für Umgebungswahrnehmung.
- Konnektivität über Wi‑Fi 6 und Bluetooth 5.2.
- Compute-Erweiterung über NVIDIA Jetson Orin NX Dock mit 100 TOPS.
- System unterstützt OTA-Updates (Over-the-Air).
- Programmierung und sekundäre Entwicklung sind vorgesehen.
- Selbstständiges Wiederaufrichten nach einem Sturz wird unterstützt.
- Lieferumfang umfasst einen Controller zur manuellen Steuerung.
- Energieversorgung über 9000 mAh Lithium-Batterie mit typischer Betriebsdauer von etwa 2 Stunden sowie Ladegerät (54 V, 5 A).
Technische Daten
- Gelenkantriebe: bis zu 43
- Freiheitsgrade (EDU-Varianten): 23–43
- Taillen-Z-Achse: ±155 °
- Knie-Winkelbereich: 0–165 °
- Hüfte P: ±154 °
- Hüfte R: -30–+170 °
- Hüfte Y: ±158 °
- Knie-Drehmoment (EDU): 120 N·m
- Knie-Drehmoment (Base): 90 N·m
- Hand-Freiheitsgrade: 7
- Arm-Traglast (EDU): ca. 3 kg
- Arm-Traglast (Base): ca. 2 kg
- Tiefenkamera: Intel RealSense D435
- 3D-LiDAR: LIVOX Mid 360
- WLAN: Wi‑Fi 6
- Bluetooth: 5.2
- KI-Compute (Erweiterungsdock): NVIDIA Jetson Orin NX, 100 TOPS
- CPU: 8‑Kern
- Akku-Kapazität: 9000 mAh
- Akkulaufzeit: ca. 2 h
- Ladegerät: 54 V, 5 A
Lieferumfang
1x Unitree G1 U5 Humanoid Robot
1x Inspire Robots Dexterous Robotic Hand RH56DFTP (rechts)
1x Inspire Robots Dexterous Robotic Hand RH56DFTP (links)
1x Controller
1x Batterie 9000mAh (Schnellwechsel-Akkusystem)
1x Ladegerät
Product Video
Tab Rechnung
Auf Rechnung kaufen
Der TONEART Onlineshop bietet kleinen und mittleren Unternehmen sowie Gewerbetreibenden die Möglichkeit, Kameraequipment bequem auf Rechnung zu kaufen. Wir gewähren Ihnen in Zusammenarbeit mit unserem Partner TEBA Kreditbank ein Zahlungsziel von 30 Tagen, und bei Bedarf auch bis zu 45 Tagen. Alles, was wir hierzu benötigen, ist die Übermittlung Ihrer Firmendaten und die Netto-Summe, welche Sie für Ihre Investition planen. Sie erhalten meist innerhalb von 24 Stunden Nachricht über die Freigabe für den Kauf auf Rechnung.
Ihre Vorteile beim Kauf auf Rechnung
- Kauf auf Rechnung in Zusammenarbeit mit unserem Partner TEBA Kreditbank
- 30 oder 45 Tage Zahlungsziel für Unternehmen und Gewerbetreibende
- Nachricht über Zusage des Rechnungskaufs innerhalb von 24 Stunden

Tab Finanzierung
Finanzierung bei TONEART
TONEART bietet Ihnen als Gewerbetreibenden zusammen mit seinen Finanzierungspartnern die Möglichkeit, Camcorder und das dazugehörige Kameraequipment liquiditätsschonend in Form eines s.g. Mietkaufes zu finanzieren. Sprechen Sie mit Ihrem Steuerberater über die Vorteile einer Finanzierung in Form eines Mietkaufes. Wir passen Ihr Investitionsvolumen zu fairen Konditionen an Ihren Bedarf an und können Ihnen bereits meist noch am selben Tag die Zusage durch unseren Finanzierungspartner übermitteln. Verwirklichen Sie sich Ihren Traum Ihres eigenen Kameraequipments und fragen Sie uns unverbindlich an!
Ihre Vorteile mit Finanzierung
- Kalkulierbare feste monatliche Kosten
- Schonung der Liquidität
- Einfache Abwicklung durch TONEART
- Es entstehen keine weiteren zusätzliche Kosten

Tab Leasing
Leasing bei TONEART
TONEART bietet Ihnen als Gewerbetreibenden zusammen mit seinen Finanzierungspartnern die Möglichkeit, Camcorder und das dazugehörige Kameraequipment liquiditätsschonend zu leasen. Leasing ist steuerlich interessant, denn Sie können die monatlichen Raten steuerlich mindernd geltend machen. Sprechen Sie mit Ihrem Steuerberater über die Vorteile einer Finanzierung in Form eines Leasings. Wir passen Ihr Investitionsvolumen zu fairen Konditionen an Ihr monatliches Budget an und können Ihnen bereits meist noch am selben Tag die Zusage durch unseren Finanzierungspartner übermitteln. Verwirklichen Sie sich Ihren Traum Ihres eigenen Kameraequipments und fragen Sie uns unverbindlich an!
Ihre Vorteile mit Leasing
- Kalkulierbare feste monatliche Kosten
- Keine Belastung der Hausbanklinie
- Bilanzneutrale Investition
- Es entstehen keine weiteren zusätzliche Kosten
| Preis Verkauf netto (new) | 53.000,00 € |
|---|---|
| Artikelnummer | 1121-06 |
| Herstellungsland | China |
| Custom Product Labels | artficial |
| EAN / UPC | 0658917511210 |
| Hersteller | Unitree Robotics |
| Lieferzeit | Vorbestellbar-Wareneingang erwartet |

-
 Unitree G1 Base - Humanoider Roboter27.370,00 € 23.000,00 €Preis-Brutto: 27.370,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 Base - Humanoider Roboter27.370,00 € 23.000,00 €Preis-Brutto: 27.370,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU-U1 - Humanoider Roboter37.485,00 € 31.500,00 €Preis-Brutto: 37.485,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 EDU-U1 - Humanoider Roboter37.485,00 € 31.500,00 €Preis-Brutto: 37.485,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU-U2 - Advanced Humanoider Roboter46.410,00 € 39.000,00 €Preis-Brutto: 46.410,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 EDU-U2 - Advanced Humanoider Roboter46.410,00 € 39.000,00 €Preis-Brutto: 46.410,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU-U3 - Humanoider Roboter60.095,00 € 50.500,00 €Preis-Brutto: 60.095,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 EDU-U3 - Humanoider Roboter60.095,00 € 50.500,00 €Preis-Brutto: 60.095,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU-U4 - Humanoider Roboter63.070,00 € 53.000,00 €Preis-Brutto: 63.070,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 EDU-U4 - Humanoider Roboter63.070,00 € 53.000,00 €Preis-Brutto: 63.070,00 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU-U6 - Humanoider Roboter68.971,21 € 57.959,00 €Preis-Brutto: 68.971,21 €Lieferzeit Vorbestellbar-Wareneingang erwartet
Unitree G1 EDU-U6 - Humanoider Roboter68.971,21 € 57.959,00 €Preis-Brutto: 68.971,21 €Lieferzeit Vorbestellbar-Wareneingang erwartet -
 Unitree G1 EDU Comp Version - Humanoider Roboter53.550,00 € 45.000,00 €UVP-Brutto: 54.740,00 € Preis-Brutto: 53.550,00 €
Unitree G1 EDU Comp Version - Humanoider Roboter53.550,00 € 45.000,00 €UVP-Brutto: 54.740,00 € Preis-Brutto: 53.550,00 €Sie sparen: 1.190,00 € Brutto (2.17 %)
Lieferzeit Vorbestellbar-Wareneingang erwartet